Performance Modelling
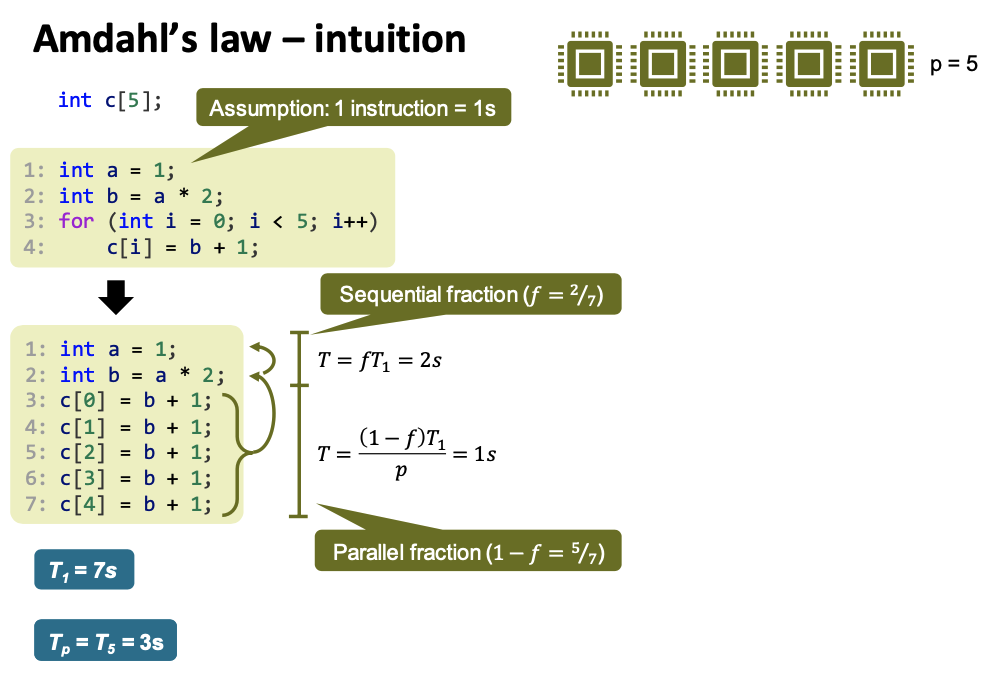
Amdahl’s law
Formally:
Amdahl’s law:
- A program runs in time $T_1$ on one processor.
- A fraction 𝑓, $0 ≤ 𝑓 ≤ 1$, of it is sequential.
- Let $T_p$ be the runtime on p processors, then \(T_p \geq fT_1 + \frac {(1-f)T_1}{p}\)
Speedup \(S_p= \frac {T_1} {T_p} \leq \frac 1 {\frac {1-f}{p} +f}\) Efficiency \(S_p= \frac {S_p} {p} \leq \frac 1 { {1-f} +fp}\) For $p \rightarrow \infty$,
\[T_\infty\geq fT_1\] \[S_\infty \leq \frac 1 f\] \[E_\infty = 0 \text{ if } f \neq 0\]
However, Amdahl’s law describes the best, ideal case. In reality, things look much worse. For example, even with very little sequential code $(f=0.05)$, the maximum speedup achievable with infinitely many processors is only $20$.
This is due to a number of factors, such as:
- No perfect load balancing
Parallelization overhead $O_p$
\[S_p = \frac {T_1} {T_p + O_p}\]- The parallel portion is not infinitely parallelizable
Why do large-scale Clusters work?
More processors → more memory → solve larger problem size
Gustafson–Barsis’ Law
If the sequential part $𝑓$ approaches $0$ for large problem sizes $n$, then \(S_\infty (n) \leq \frac 1 {f(n) }\xrightarrow[n \rightarrow \infty]{} \infty\)
Strong vs Weak Scaling
| Strong Scaling(Amdahl’s Law) | Weak Scaling (Gustafson-Barsis’ Law) |
|---|---|
| Describes behavior of $S_p(n)$ for fixed $n$ and $p → ∞$ | Describes behavior of $S_p(n)$ for $n, p → ∞$ |
| Complete the same amount of work faster | More processors allow us to do more work |
The next level of detail: execution traces
Abstract program view to reason about execution of program.
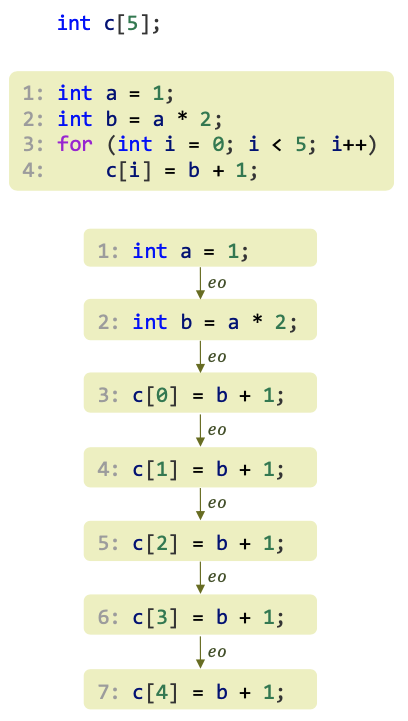
Execution Trace
Order in which program instructions are executed, given as sequence of instructions. It depends on both program code and program inputs.
- $\xrightarrow{eo}$: Execution order
- $u \xrightarrow{eo} v$: instruction $u$ completes before instruction $v$ is executed
From traces to execution DAGs
Execution order $\xrightarrow{eo}$ is a total order (implies sequential execution)
- What about parallel execution?
- What can run in parallel?
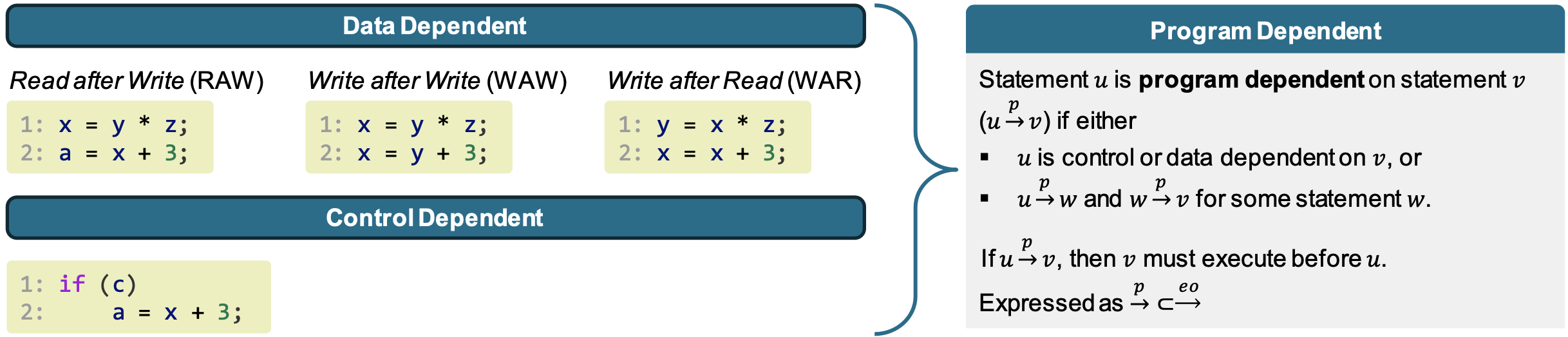
- “independent” program statements
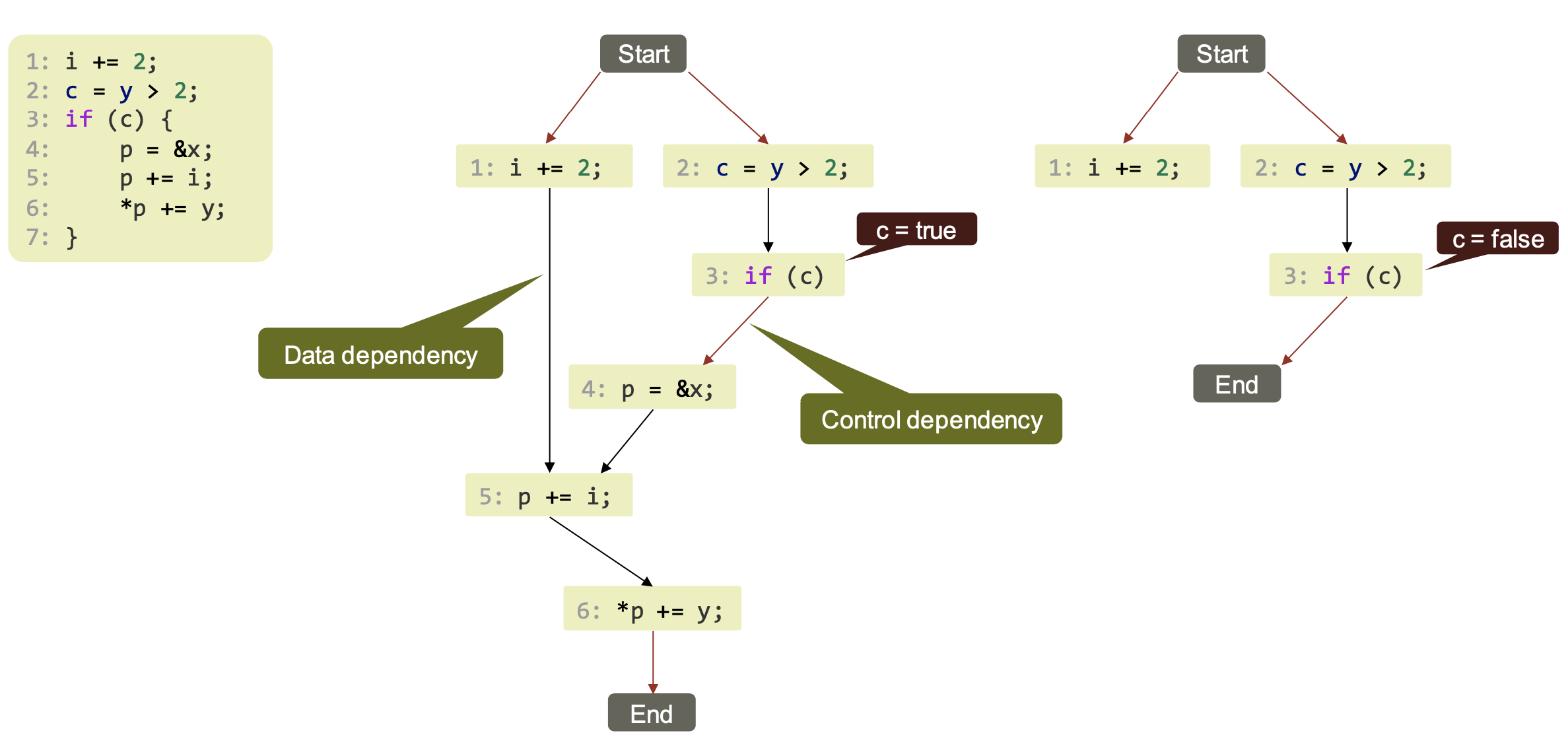
$\xrightarrow{p}$ forms a directed acyclic graph (DAG) of the program → Execution DAG 
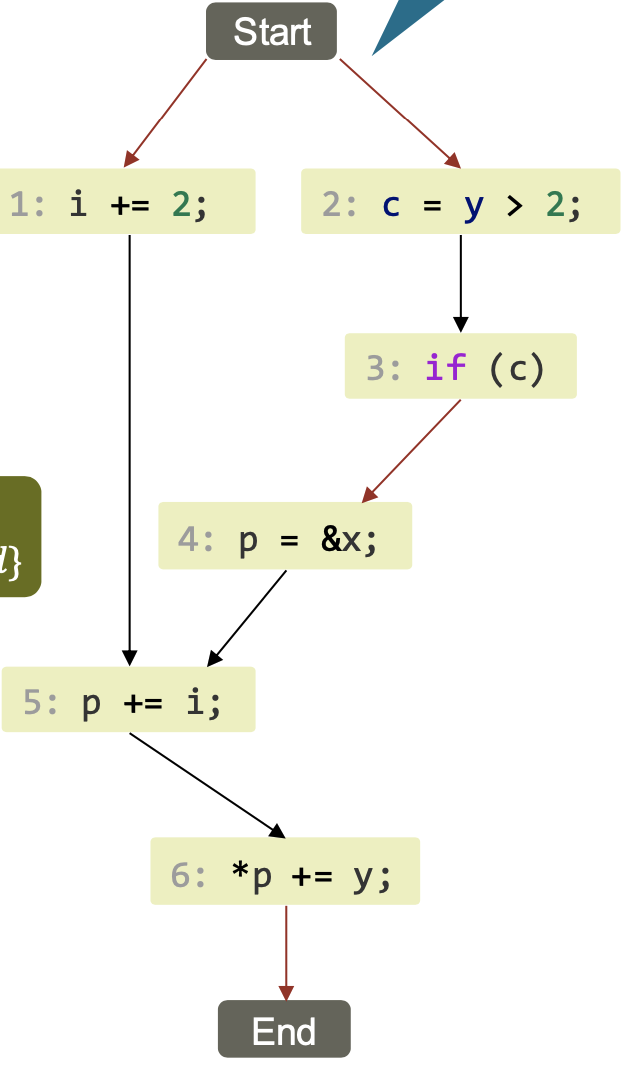
Example DAG
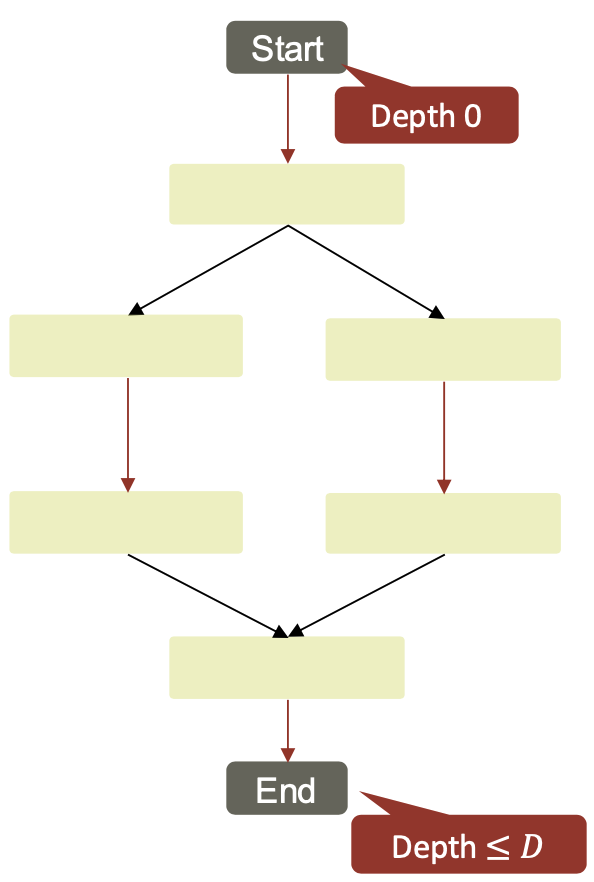
Work and Depth Metrics
Work: $W(n) =$ number of nodes in EDAG
Depth: $D(n) =$ number of nodes on longest path from Start to End
Average parallelism: $\frac {W(n)}{D(n)}$
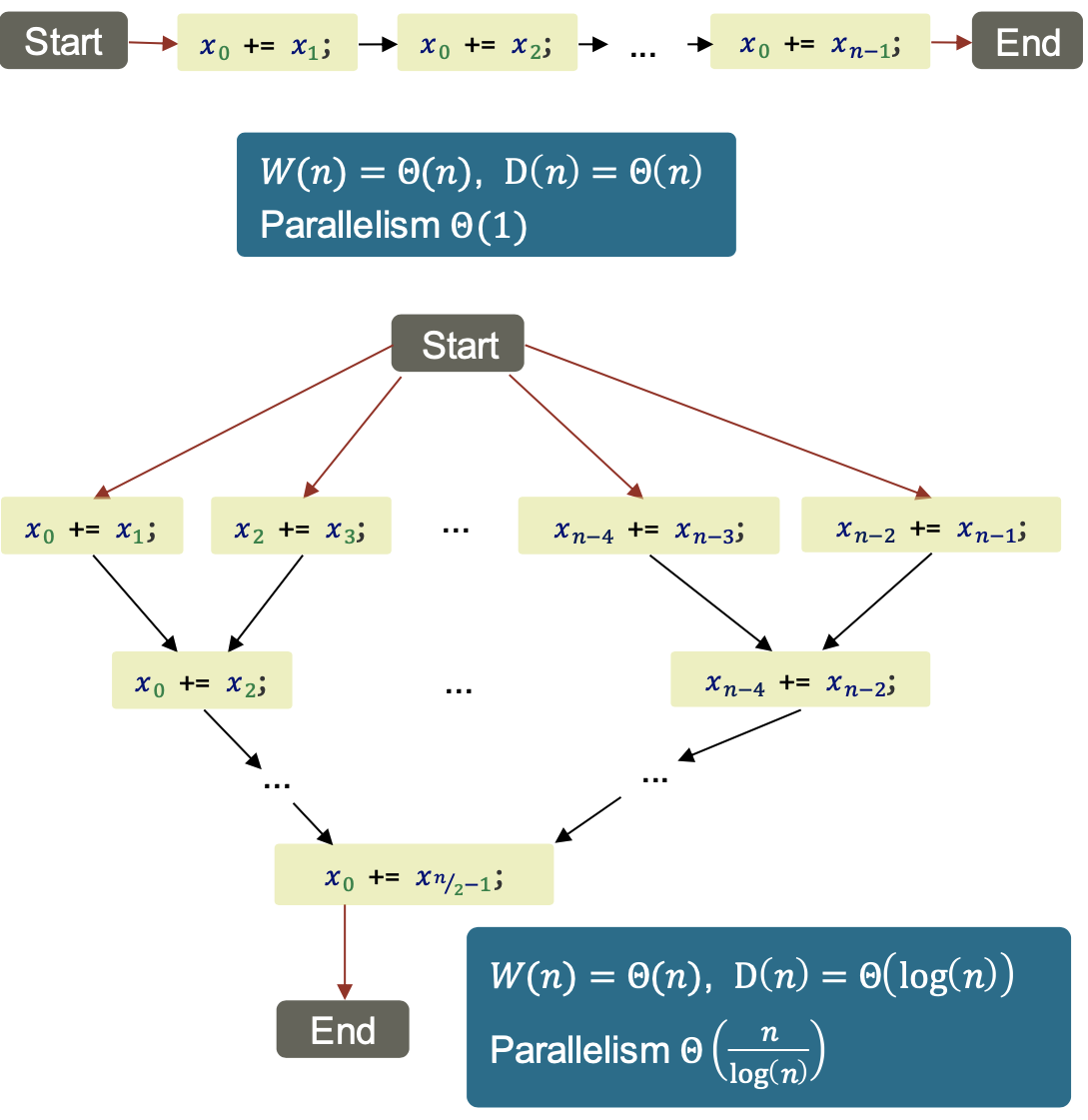
| Example $W = 6, = 5$ | Example: Reduction $(x_0, x_1, …, x_{n-1})$ |
|---|---|
 |  |
Example: Mergesort
1
2
3
4
5
6
7
sort(L):
if length(L)<2: return L;
L1 = sort(left(L));
L2 = sort(right(L));
return merge(L1, L2);
| Work | $W(n)= \theta(n\log n)$ |
| Depth | $D(n)=D(\frac n 2) + \theta(n) = \theta(n)$ |
| Parallelism | $\theta(\log n)$ |
→ Parallel merge with better $D(n)$ exists
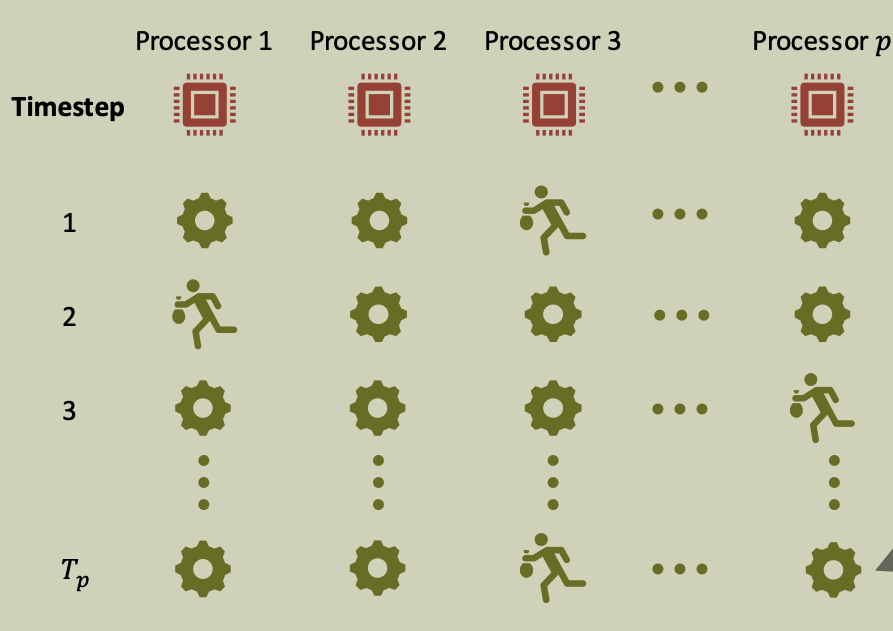
Scheduling EDAGs to Machines
Simple machine model for parallel computing (idealized shared memory multiprocessor) 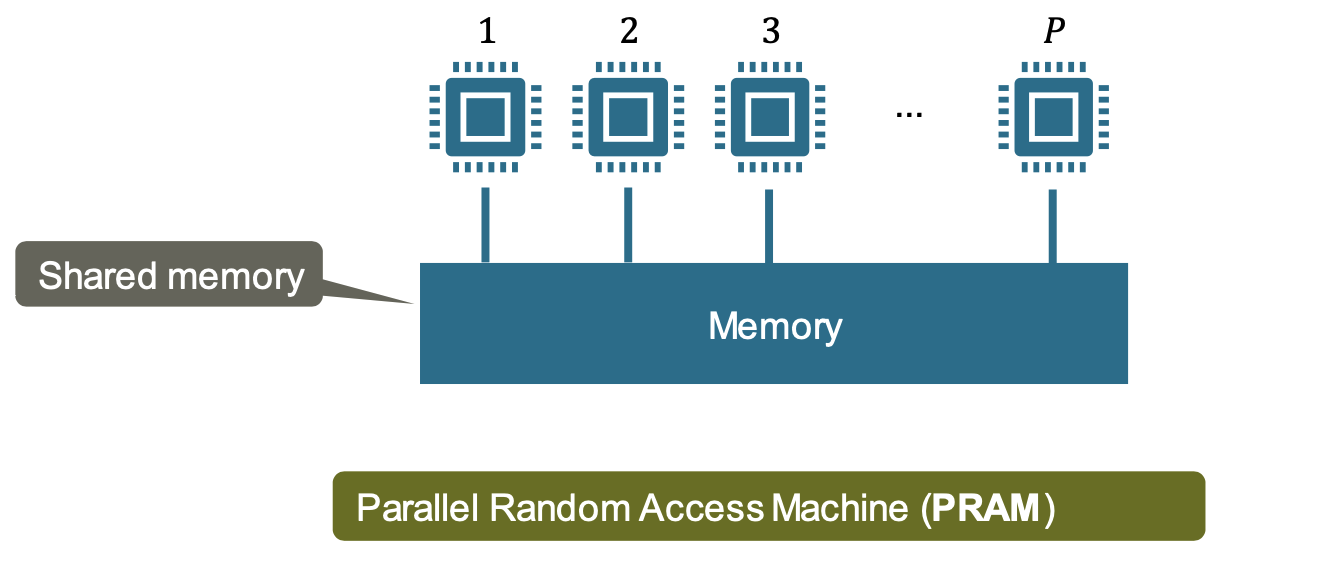
- Instructions, including memory accesses, execute in unit time.
- Processors progress in lockstep (each time step, each processor executes one instruction)
Scheduler
Function that, given EDAG, selects at most $P$ ready instructions for execution at next time step
Offline scheduler: computes schedule in advance
Online scheduler: next instructions based on past instructions and set of ready instructions
Scheduling Lower Bound (PRAM): \(T_p \geq \max (\frac W P, D)\)
Proof:
- Total number of instructions = $W ≤ P ⋅ T_P$
- Each step can execute $≤ 1$ instruction on a directed path of the EDAG → $ ≤ T_P$
Greedy Scheduler
Idea: Do as much as possible in every step
Ready node
a node is ready if all predecessors have been executed
Greedy Scheduling Procedure (Online)
Complete Step: #{ready nodes} $≥ P$
- → Run any P nodes from the set of ready nodes
- Number of complete steps $\leq \frac W P$
Incomplete Step: #{ready nodes} $< P$
- → Run all ready nodes
- Number of incomplete steps $\leq D$
Brent’s Lemma
Any greedy scheduler achieves execution time \(T_p \leq \frac {W+(P-1)D} P\)
Greedy Scheduler: Sketch
Maintain task pile of unfinished tasks, each ready or not. Initial root task in task pile with all processors idle.
Pile needs concurrency-control / locking!
At each step, processors are idle or have a task t to work on:
1
2
3
4
5
6
7
8
9
10
11
12
13
If idle:
Get an (arbitrary) ready task from pile
If working on task t:
Case 0
t has another instruction to execute → execute it
Case 1
t spawns task s → return t to pile, continue with s
Case 2
t stalls → return t to pile and idle
Case 3
t dies (finishes) → continue with parent p or idle
(if p has living children)
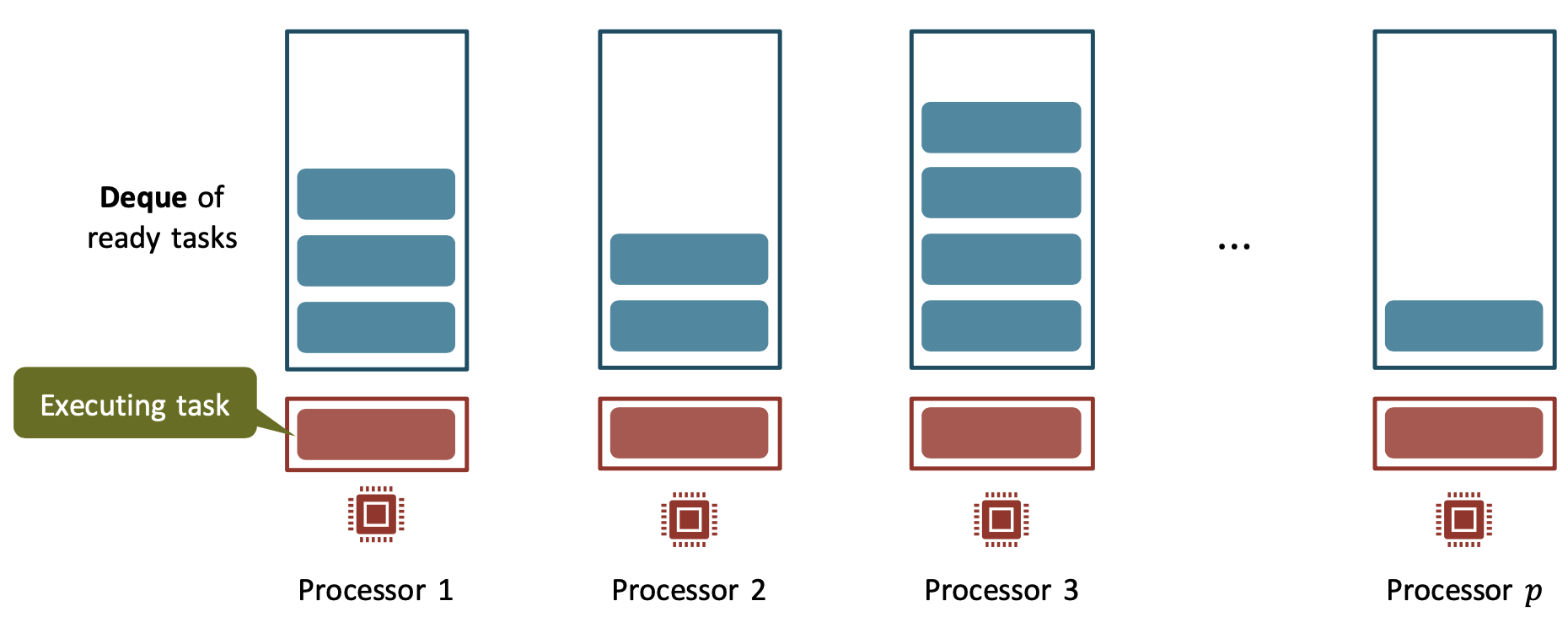
Work-stealing scheduler
The centralized workpile of the greedy scheduler can become a bottleneck when the number of processors is large.
Each processor maintains its own workpile:
- All processors do only useful work and operate locally as long as there is work
- Processors with empty work-piles will try to steal tasks
At each step, we associate with each executing or ready task a node of the EDAG.
Each
vspawnoperation spawns exactly two children tasks. Spawns of more than two tasks are replaced by a binary tree of operations that spawn a pair of tasks.
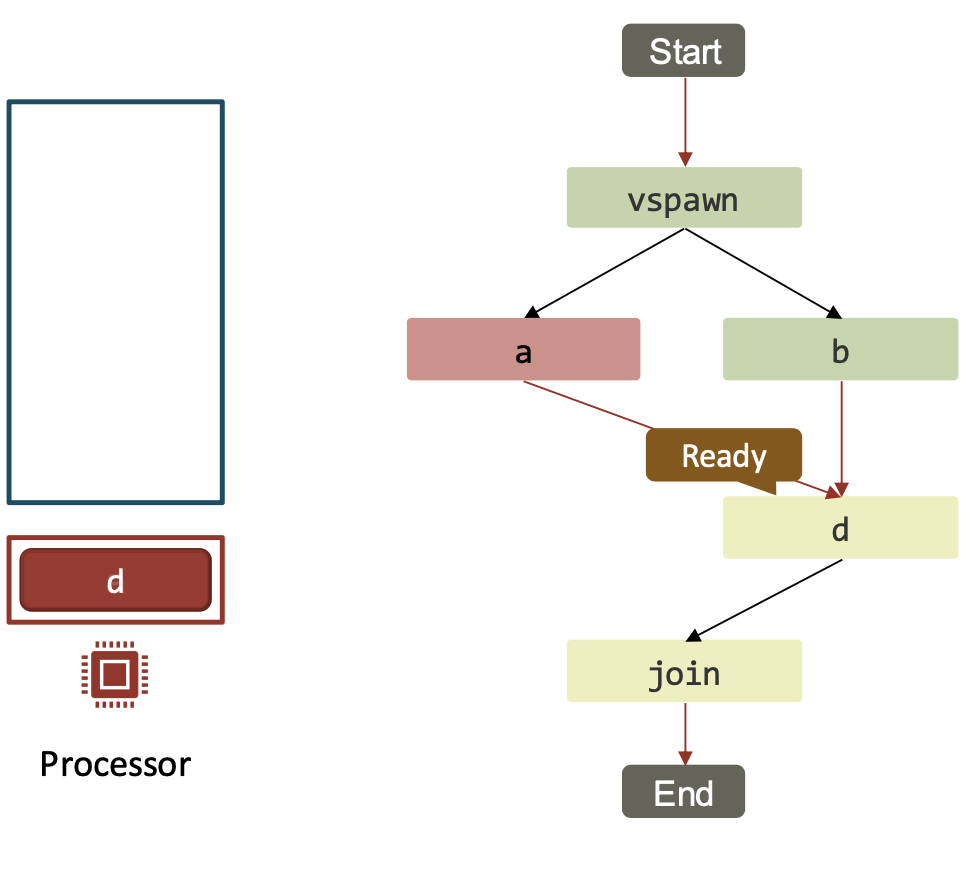
| If a task enabled 2 children, 1 of them is pushed to the local work-pile and the other is executed next. | 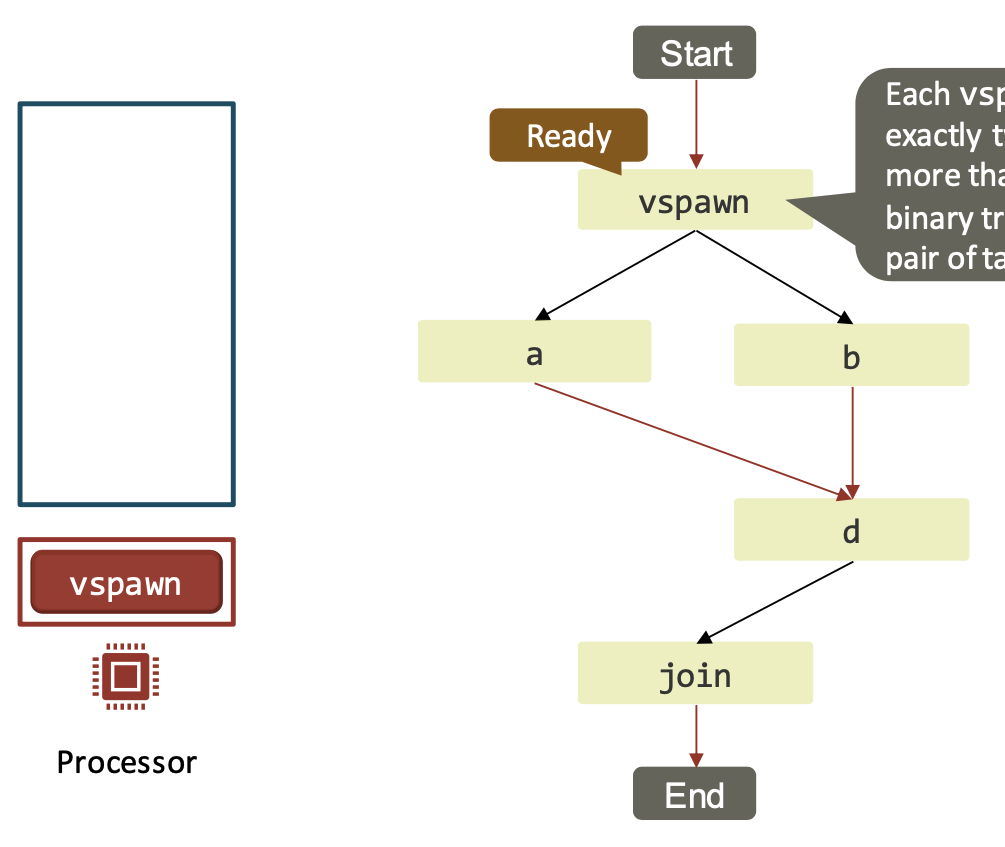 |
| If a task enabled 1 child, it will continue executing that child. | 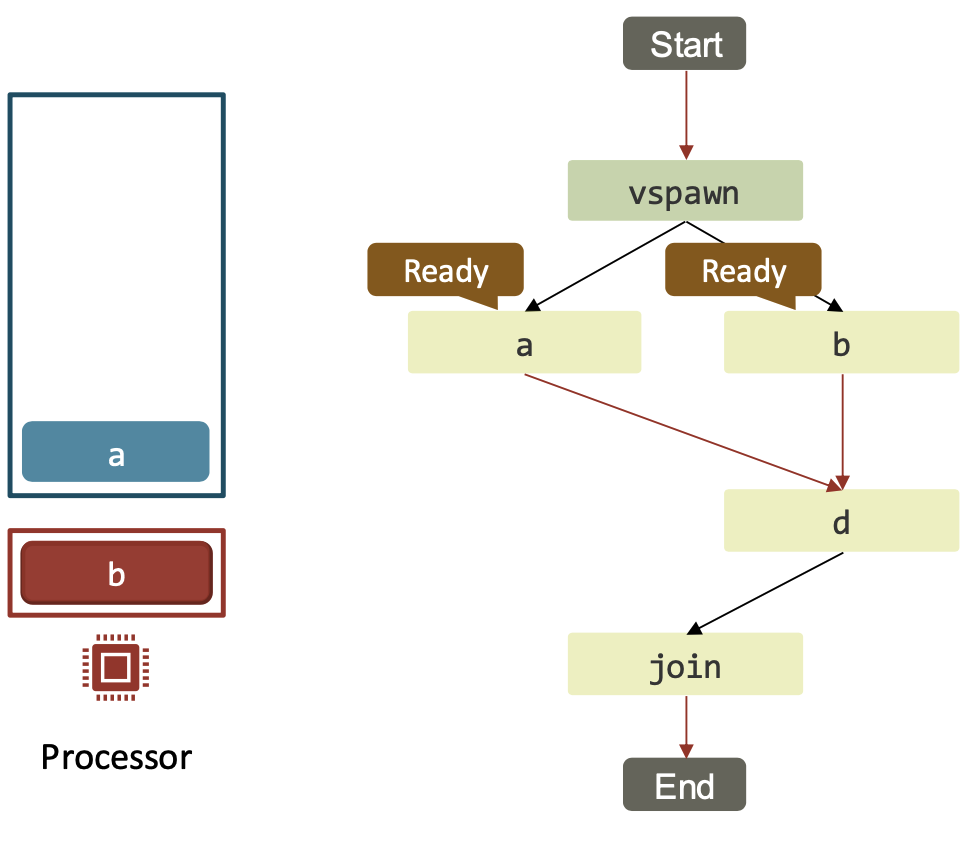 |
 |
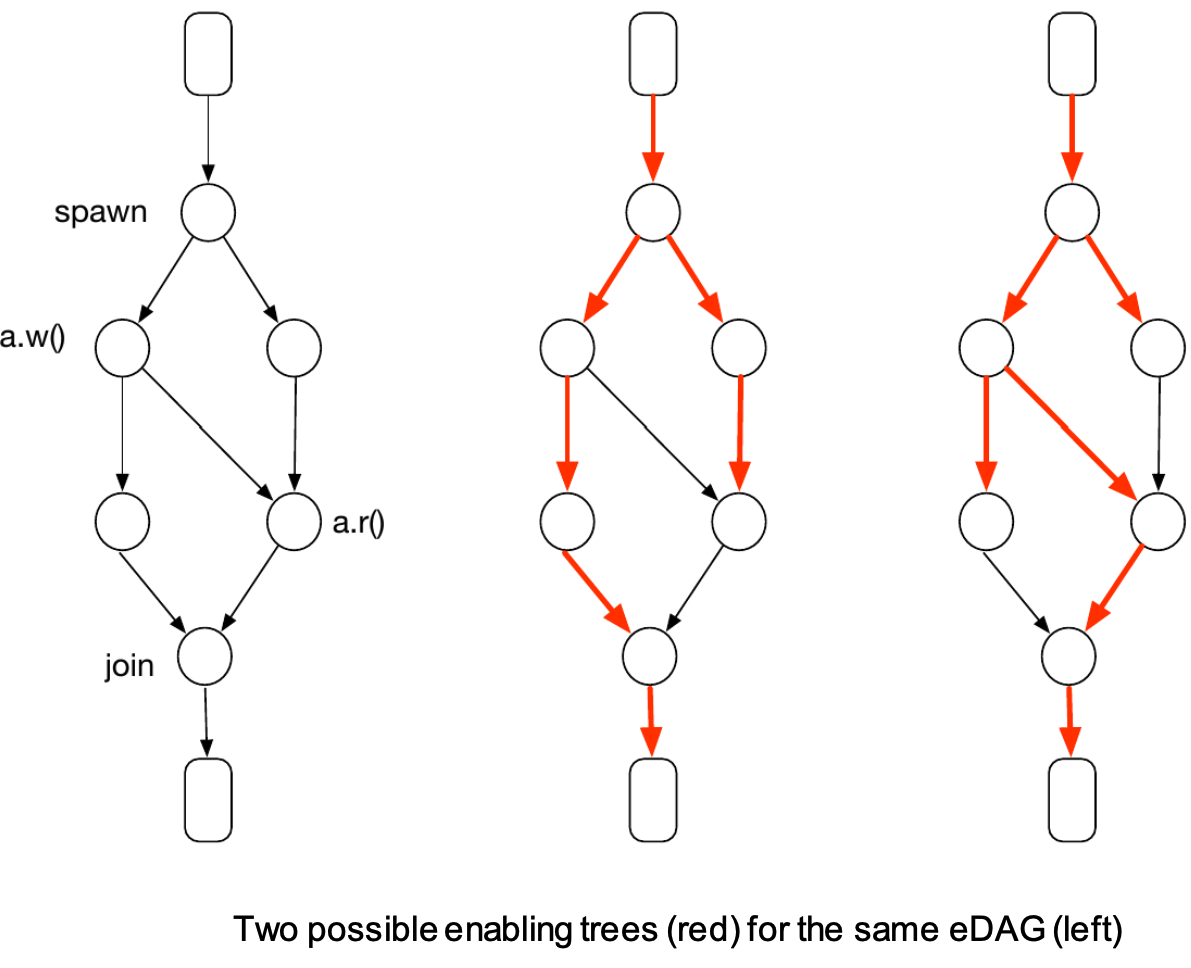
- The depth of the enabling tree is less or equal to the depth of the EDAG.
- The exact structure of the enabling tree depends on the scheduler.
Work-stealing scheduler – enabling tree example
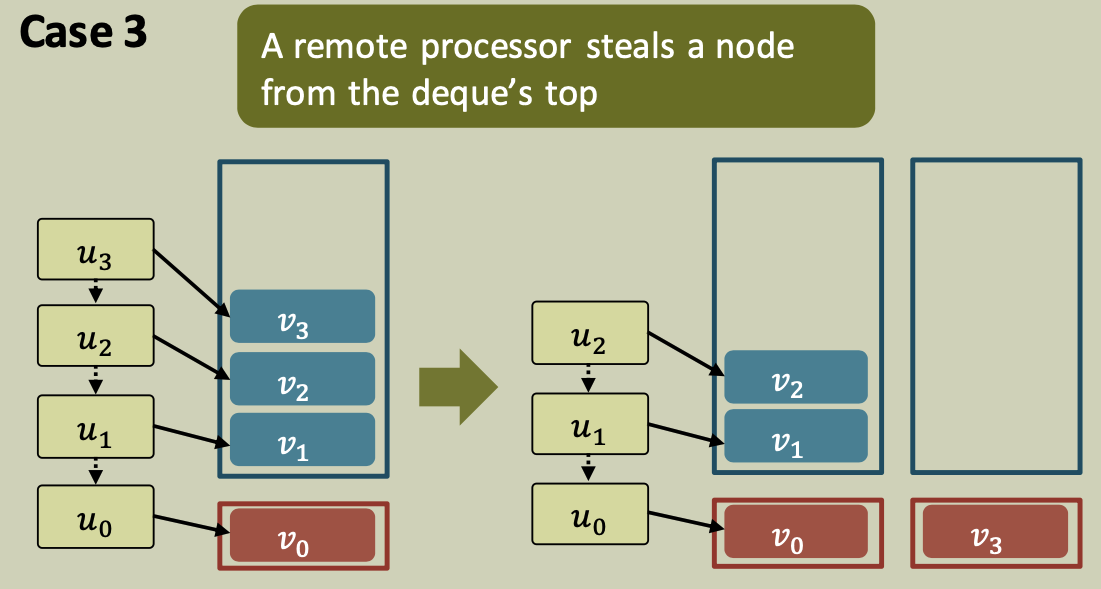
If the deque is empty, it will attempt to steal a node from the top of another randomly chosen deque.
A steal may fail if the target deque has 0 or 1 entries or was successfully targeted by another stealer.
Stealing is overhead! How do we know that we are not stealing all the time, leading to sequential performance (no speedup)?
Work stealing scheduler: Proof sketch
Lemma 1
If $S$ is the number of attempted steals then
\[T_P = \frac {W + S} P \qquad \longrightarrow \qquad P \cdot T_P = S + W\]
At each time-step, a processor either executes a task or attempts a steal.
Thesis
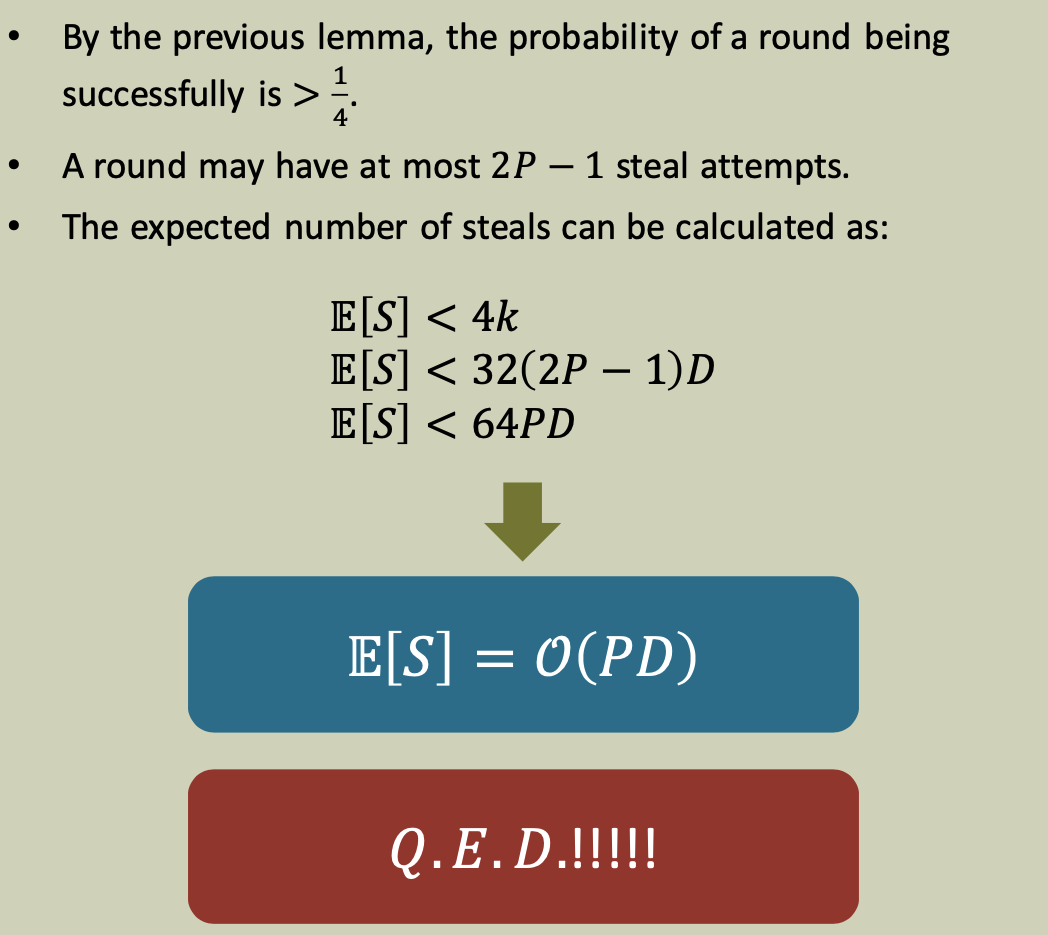
The goal of the proof is to show that the expected number of steal attempt is
\[\mathbb{E} [S] = O(PD) \longrightarrow \mathbb{E} [T_P] = \mathbb{E} [\frac {(W+S)}P] = O(\frac W P + D)\]Remember: Brent’s lemma for a greedy scheduler \(T_P \leq \frac {W+(P-1)D} P\)
The depth is an upper bound on the number of timesteps where some processor is idle (similar to Brent’s lemma), so that the total number of idling work cycles is $O(PD)$.
Lemma 2: Structural lemma
- For any of the $P$ deques, the parents of the nodes in the deque always lie on some root-to-leaf path of the enabling tree.
- The order of the parents along this path corresponds to the top-to-bottom order of the nodes in the deque.
Let $v_1,…,v_k$ denote those nodes ordered from the bottom to the top. If there is an executing node on that processor, denote it as $v_0$.
Let $u_i$ be the node that enabled $v_i$. Then, $\forall \; 0 < i ≤ k$, node $u_i$ is an ancestor of node $u_{i-1}$ in the enabling tree.
While we may have $u_0$ = $u_1$, for all $i \neq 0$, $u_i \neq u_{i+1}$
| No new node | $1$ new node | $2$ new nodes | Steal |
|---|---|---|---|
 |  |  |  |
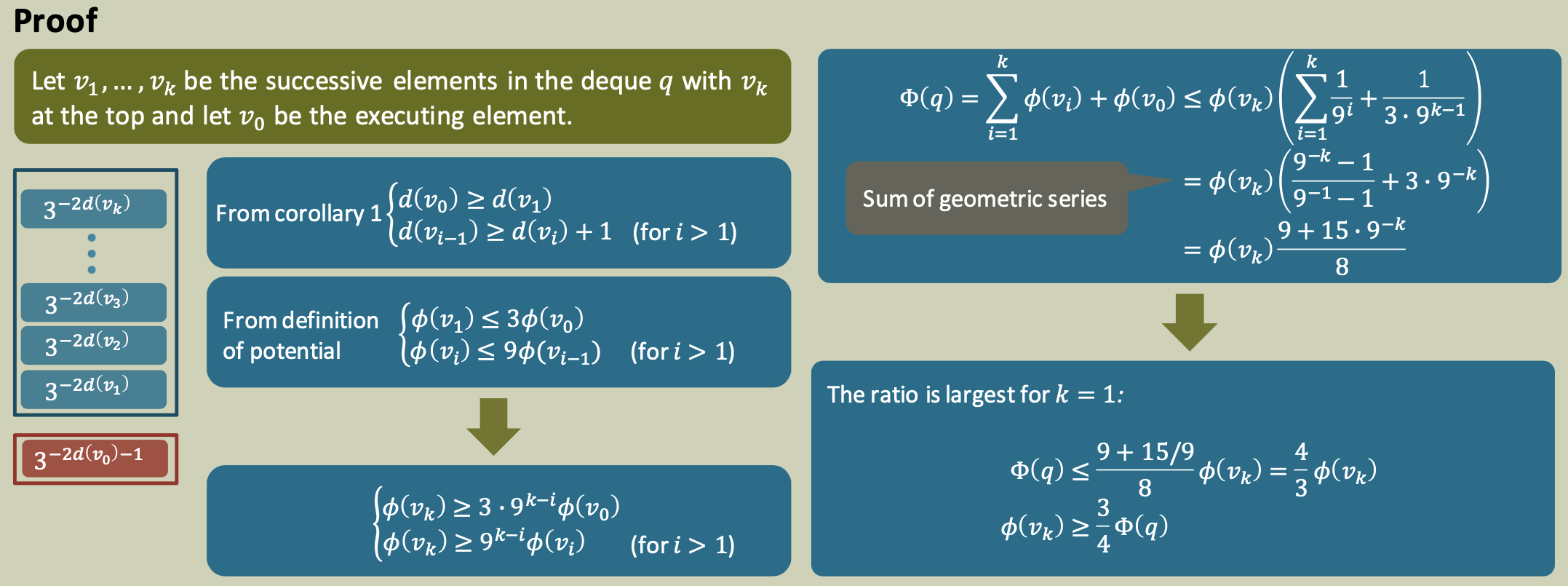
Corollary 1
We define the depth $d(u)$ of a node to be the distance of node $u$ from the root (start) in the enabling tree. $\rightarrow$ Structural lemma $\rightarrow$
Corollary 1
If $v_1,…,v_k$ are nodes in a deque ordered from the bottom to the top, and $v_0$ is the currently executing node, then we have $d(v_0) ≥ d(v_1) > ⋯ > d(v_k)$.
The levels of nodes (excluding the currently executing node) in each deque are strictly increasing from top to bottom.
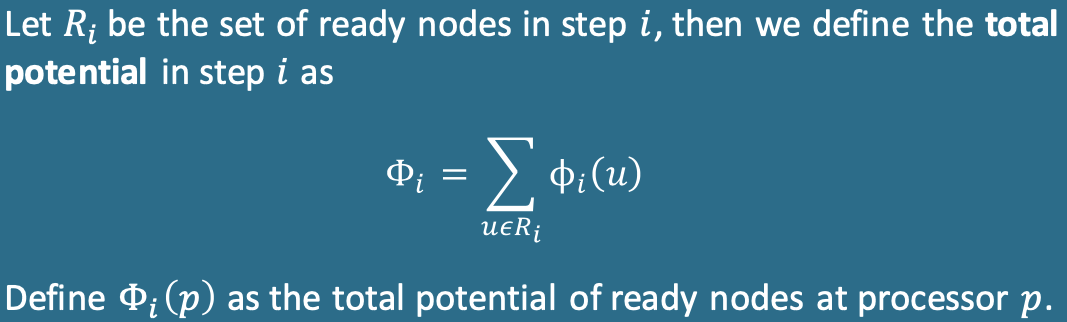
Potential function
We define a potential function $\phi_i (u)$ at step $i$ for a ready node $u$ as 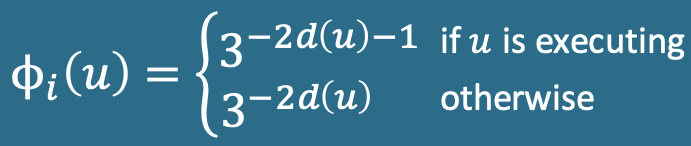
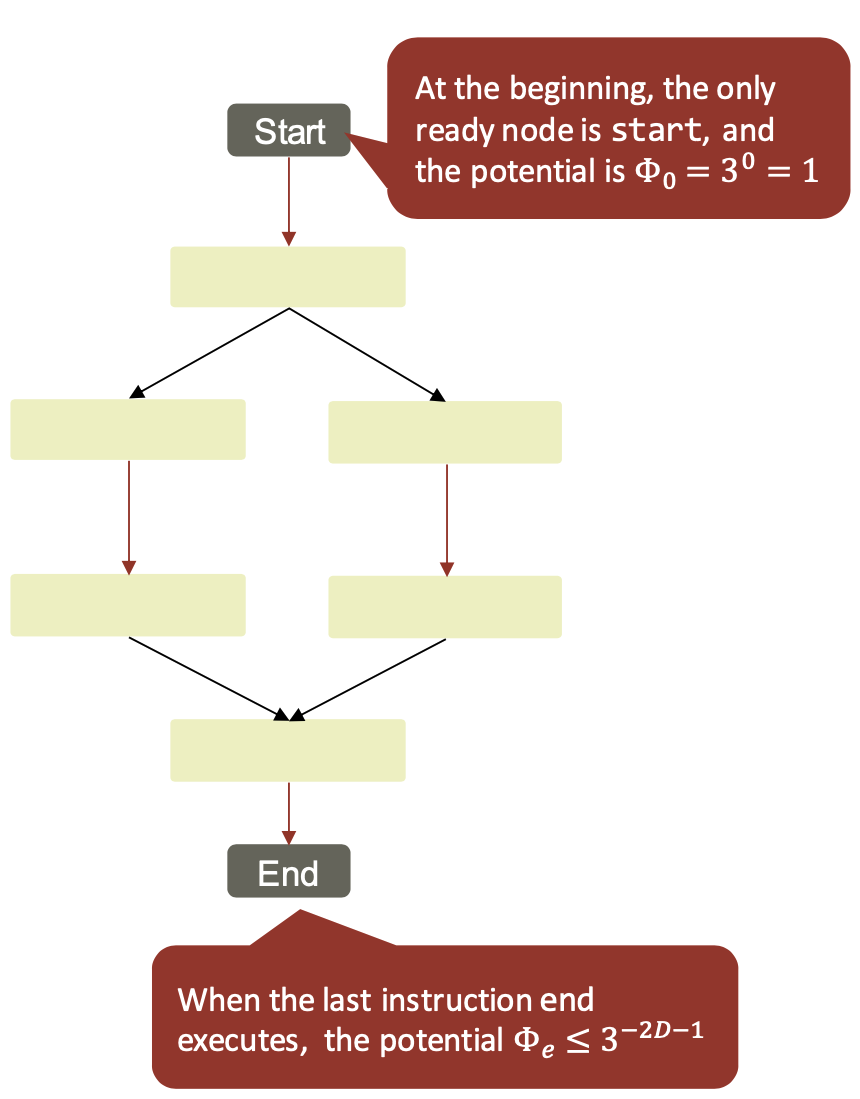
We show that the potential is monotonic and non-increasing. We show that each possible transition decreases the potential (i.e., $\phi_{i+1} \leq \phi_i$ ). The 4 cases are the same as those from the structural lemma.
Note that a failed steal does not change the potential.
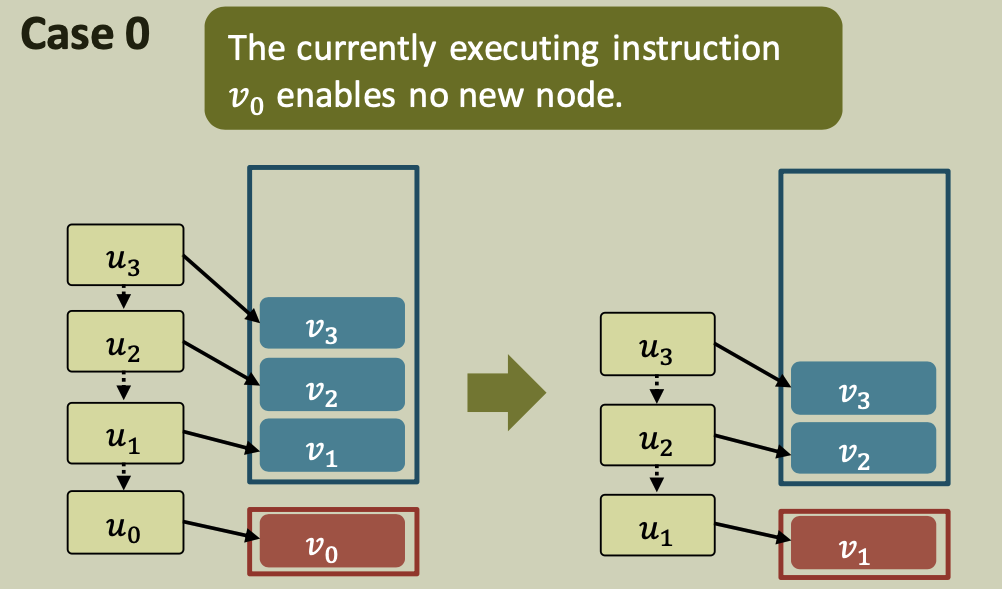
Case 0
A processor finishes the execution of a node u that enables no new node. 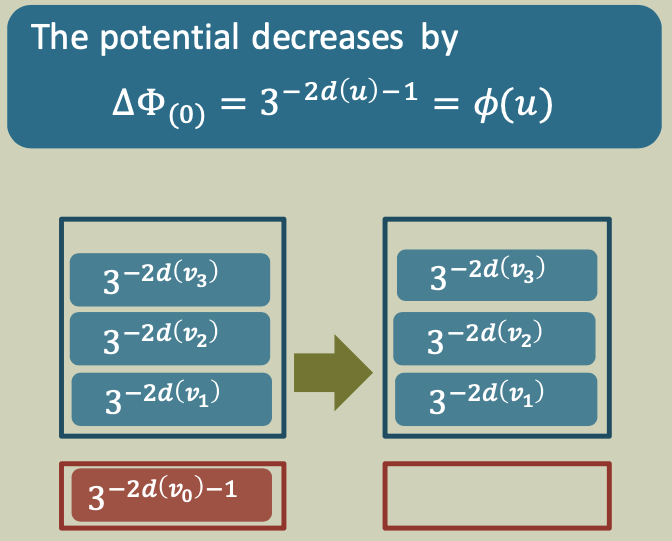
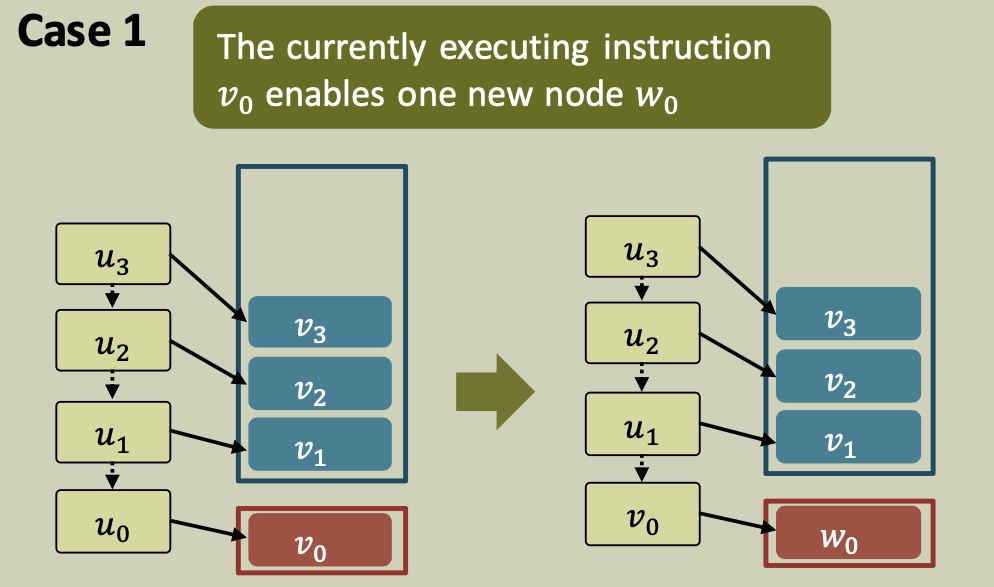
Case 1
A processor finishes the execution of a node $u$ that enables a new node $v$ to be executed immediately. Node $v$ is the child of $u$ in the enabling tree so that \(d(v)=d(u)+1\) 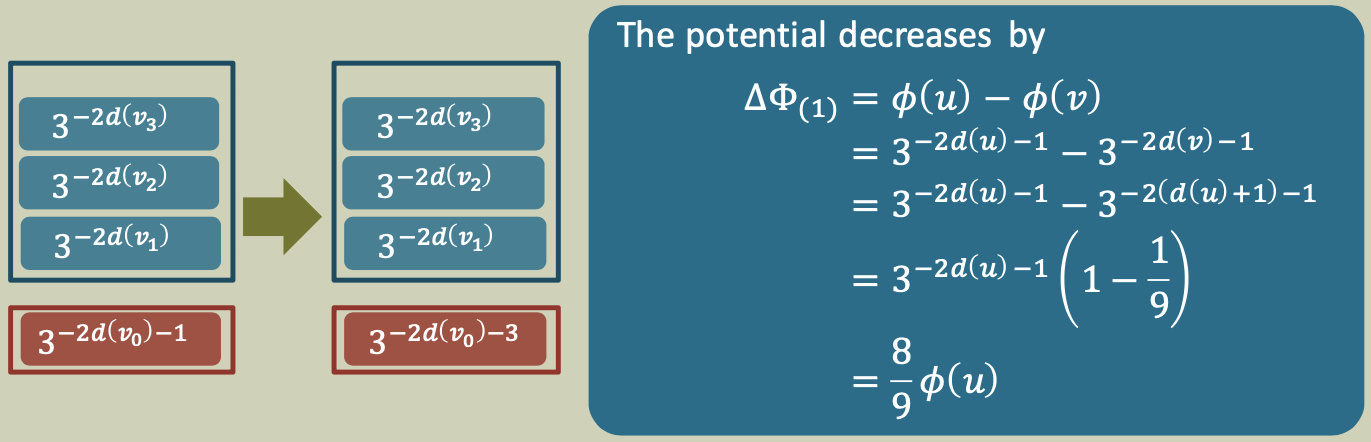
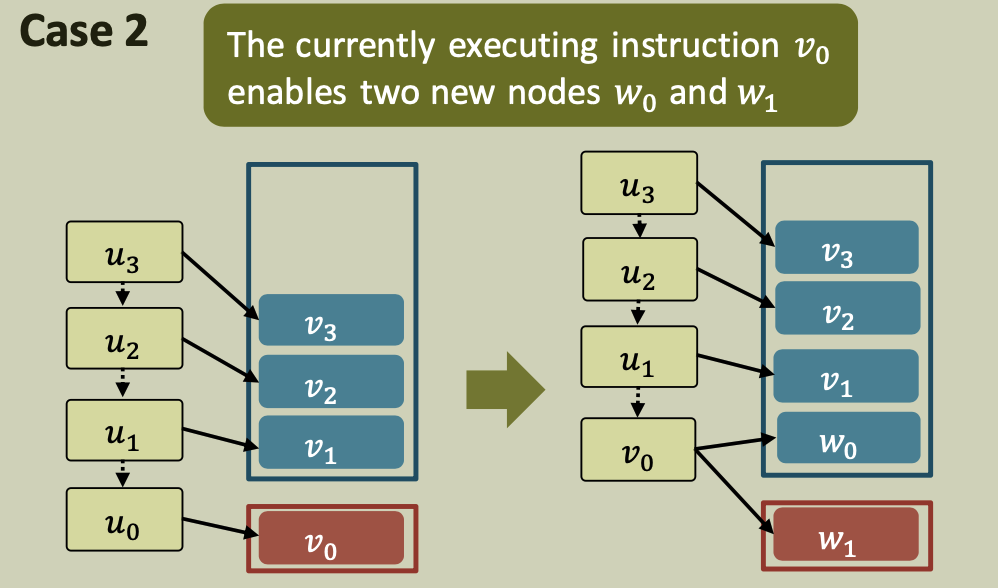
Case 2
A processor finishes the execution of a node $u$ that enables 2 new nodes $v$ and $w$, one being executed. Without loss of generality, assume that $v$ is executed and $w$ is pushed to the lower end of the deque. 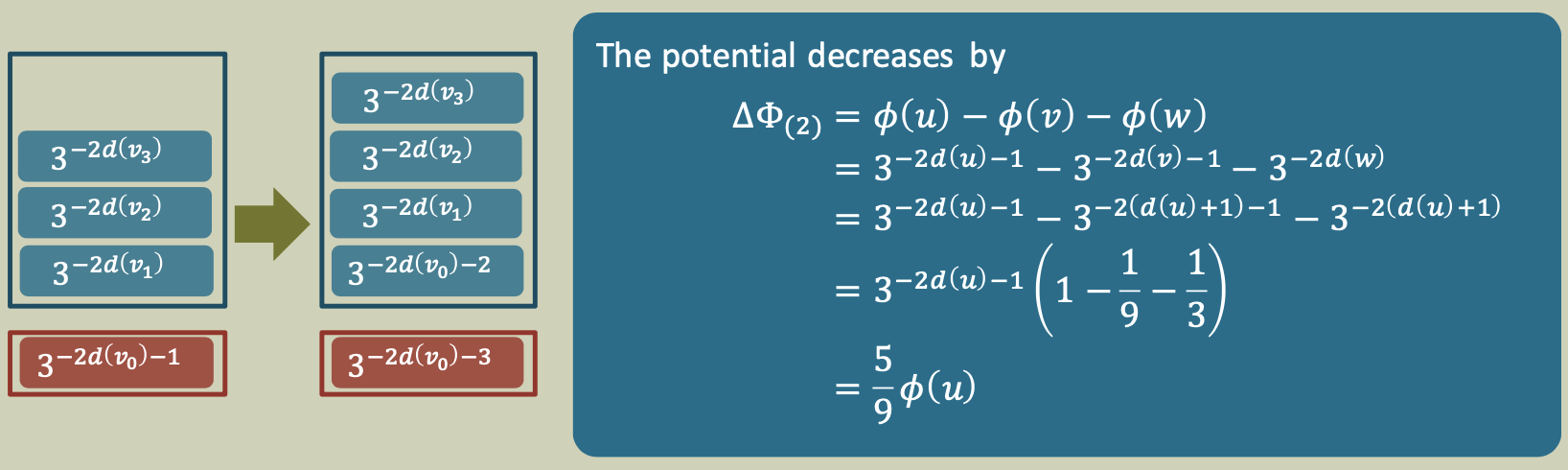
Case 3
A processor steals a node $u$ from the top of some other deque and readies it for execution. 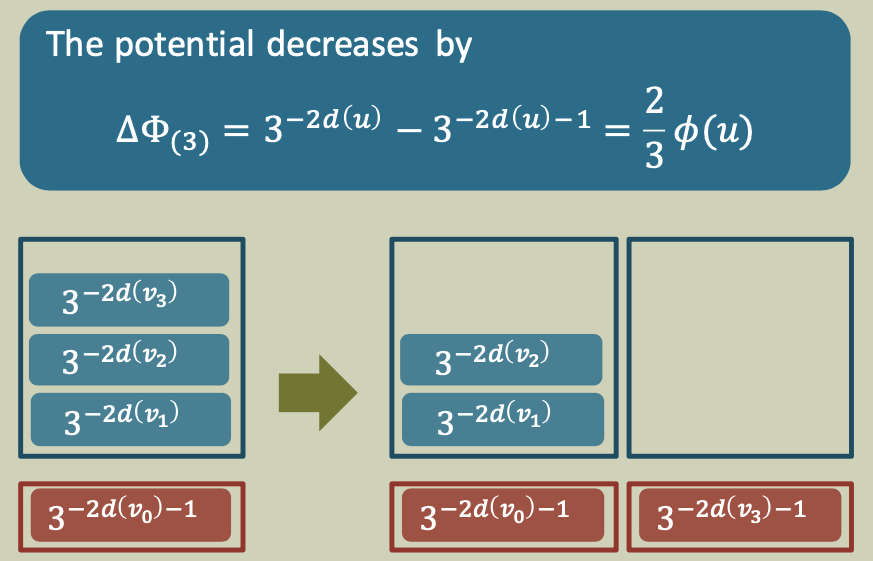
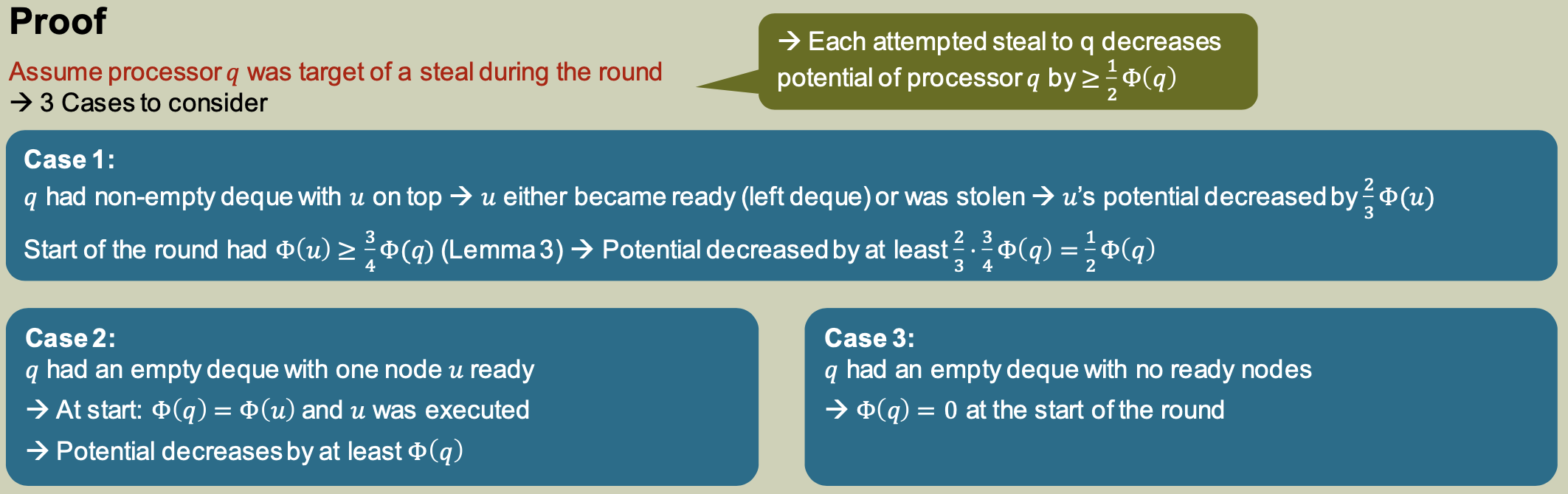
Lemma 3: Top-heavy Deques
The top element in any non-empty deque has at least $\frac 3 4$ of the total potential of the deque.
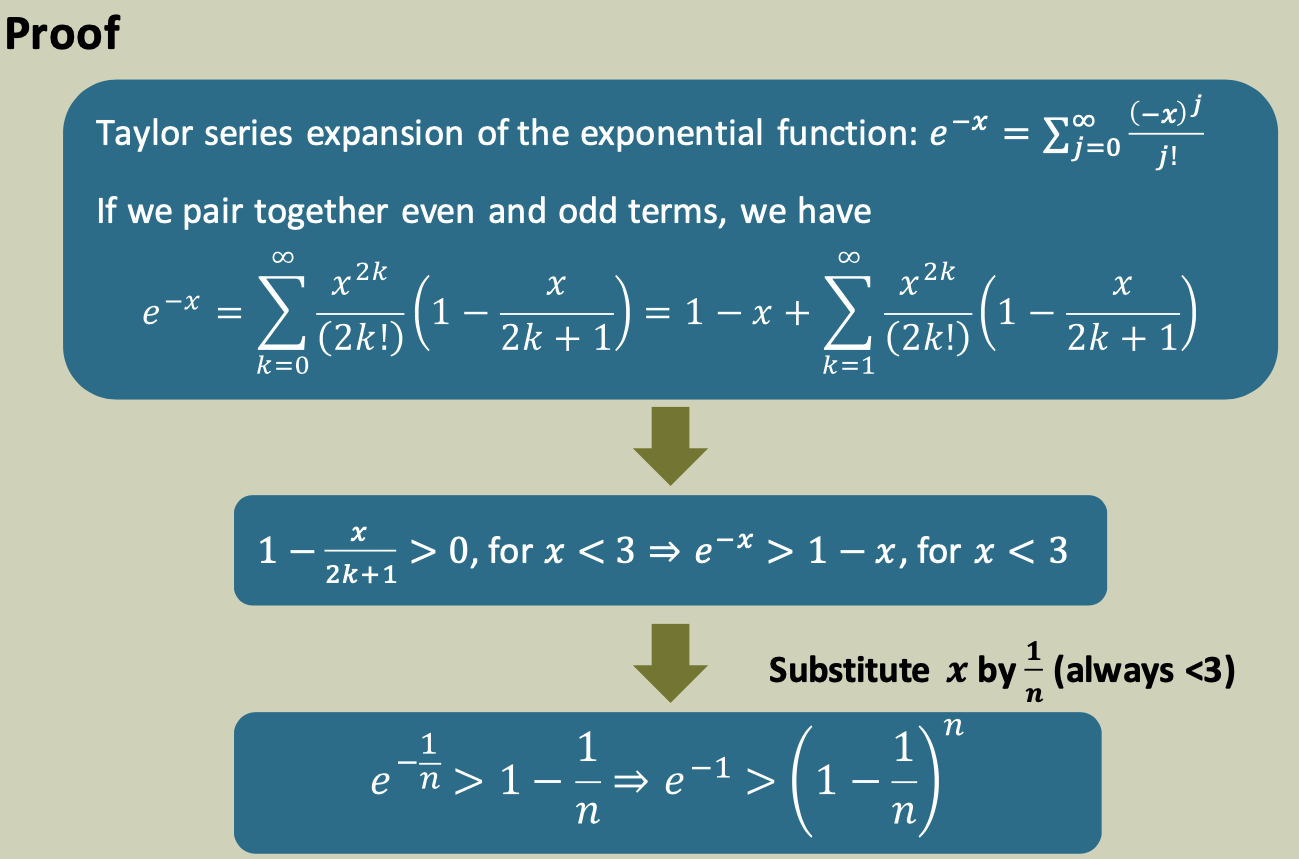
Lemma 4
For $n>1$, \((1-\frac 1 n)^n<\frac 1 e\)
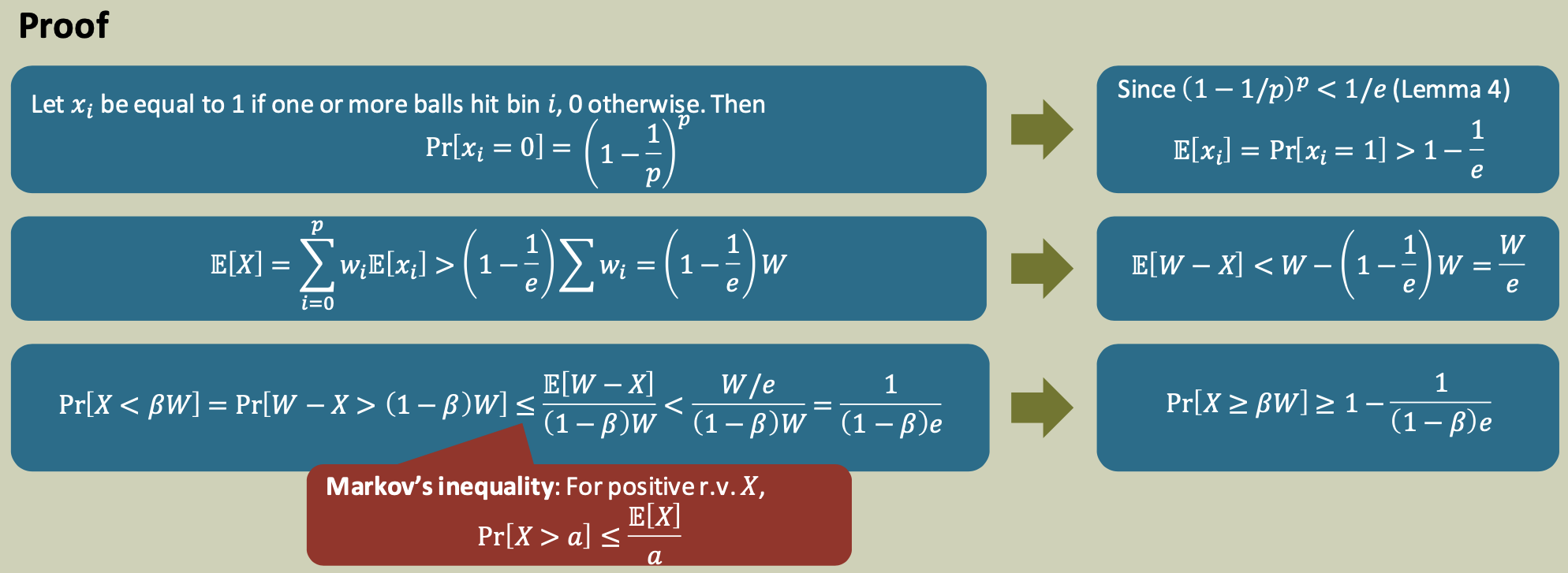
Lemma 5: Balls and weighted bins
Consider the following game: $p$ balls are tossed into $p$ bins. Each bin $i$ is associated with a weight $𝑤_i$ . Assume that the balls are equally likely to hit each bin, and all tosses are independent. What is the total weight of the non-empty bins?
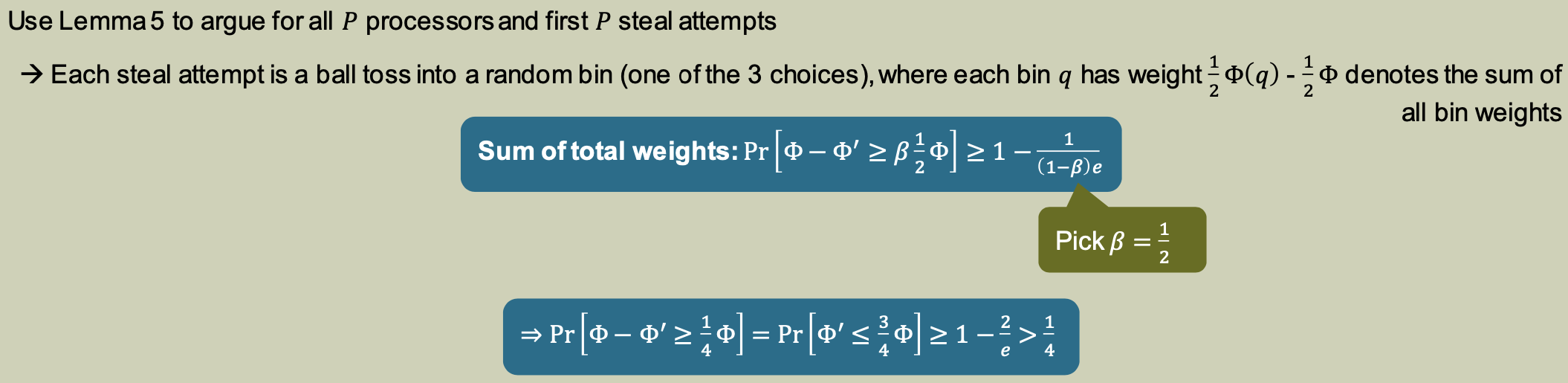
Lemma 5
Let $W=\sum w_i$ and let 𝑋 be the total weight of the non-empty bins. Then for any $0 < \beta < 1$, \(Pr[X\geq \beta W] \geq 1- \frac 1 {(1-\beta)e}\)
Lemma 6
One step before the end of the round, we have at most $P-1$ steals and in the last step of the round, we can add at most $P$ steals, thus a round may have between $P$ and $2P-1$ steal attempts.
We first show that a round decreases the potential by a fixed fraction with high probability.
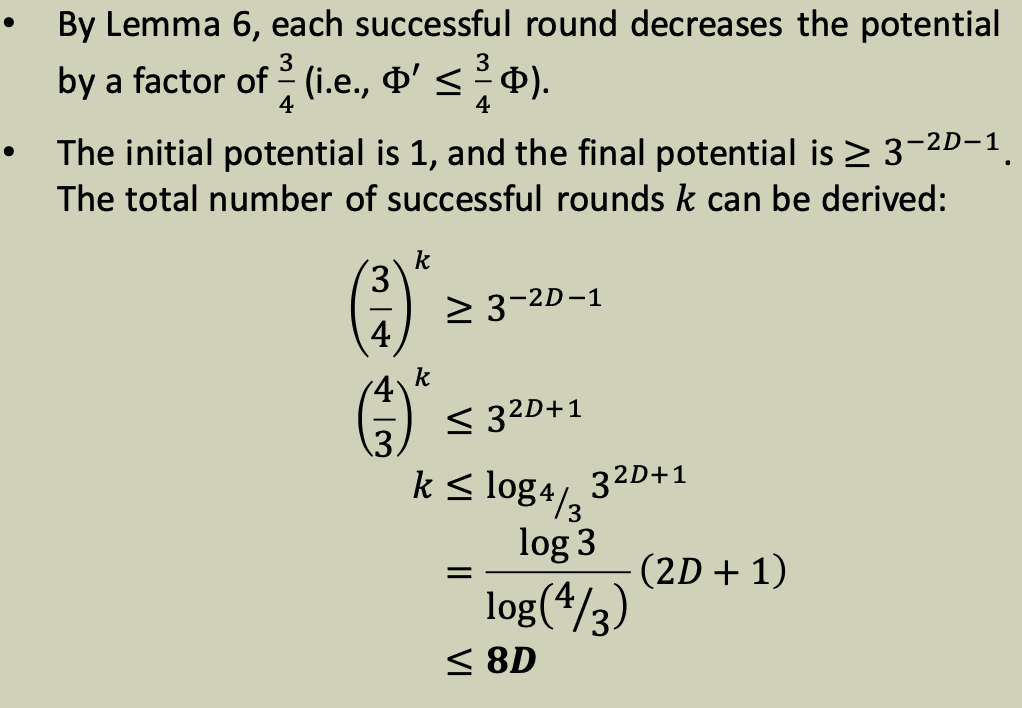
Lemma 6
Let $\Phi$ be the potential at the start of a round and let $\Phi’$ be the potential at the end of the round. Then \(Pr[(\Phi - \Phi') \geq \frac 1 4 \phi] > \frac 1 4\)